第一章 单元测试
1、判断题:日本人发明了世界上第一台工业机器人。
A:错
B:对
正确答案:【错】
2、判断题:世界上工业机器人的四大家族是日本的安川电机、发那科、德国的库卡、瑞士的ABB。
A:错
B:对
正确答案:【对】
3、判断题:自工业机器人诞生以来,汽车行业一直是其主要应用领域。
A:对
B:错
正确答案:【对】
4、判断题:机器人涵盖非常广泛,如无人机、无人驾驶汽车、火星车等都可以归类为机器人。
A:对
B:错
正确答案:【对】
5、判断题:当下,最先进的机器人,其活动能力和智能已经超过人类。
A:错
B:对
正确答案:【错】
6、单选题:robot是由捷克文robota意为( )衍生而来的。
A:保姆
B:守护者
C:农奴、苦力
D:服务员
正确答案:【农奴、苦力】
7、单选题:机器人学术界一直将( )作为机器人开发的准则。
A:示教-再现
B:独立化
C:机器人学三原则
D:智能化
正确答案:【机器人学三原则】
8、单选题:( )德沃尔最早提出了工业机器人的概念,并申请了专利。
A:中国
B:日本
C:美国
D:德国
正确答案:【美国】
9、单选题:现有的工业机器人大多采用( )这种示教方式。
A:离线编程
B:虚拟仿真
C:示教再现
D:遥控操纵
正确答案:【示教再现】
10、单选题:工业机器人比较统一的定义是ISO采纳的( )的定义:一种可以反复编程和多功能的,用来搬运材料、零件、工具的操作机;或者为了执行不同的任务而具有可改变的和可编程的动作的专门系统。
A:国际标准化组织
B:美国机器人协会
C:英国牛津字典
D:中国科学家
正确答案:【美国机器人协会】
第二章 单元测试
1、单选题:按机器人的驱动方式分类,将机器人分为( )。
A:喷涂机器人、上下料机器人
B:工业机器人、服务型机器人和特种机器人
C:非伺服机器人和伺服控制机器人
D:气动式机器人、液动式机器人和电动式机器人
正确答案:【气动式机器人、液动式机器人和电动式机器人】
2、单选题:直角坐标系机器人、圆柱坐标机器人、极坐标型机器人、平面关节机器人和多关节机器人属于按( )分类
A:机器人的坐标系统
B:机器人的智能方式
C:机器人的驱动方式
D:机器人的控制方式
正确答案:【机器人的坐标系统】
3、多选题:机器人系统三大部分包括( )。
A:传感部分
B:控制部分
C:机械部分
D:传动部分
正确答案:【传感部分;控制部分;机械部分】
4、多选题:机器人关节的种类有( )。
A:移动关节
B:球关节
C:回转关节
D:圆柱关节
正确答案:【移动关节;球关节;回转关节;圆柱关节】
5、单选题:下面的机器人结构简图中属于( )轴机器人。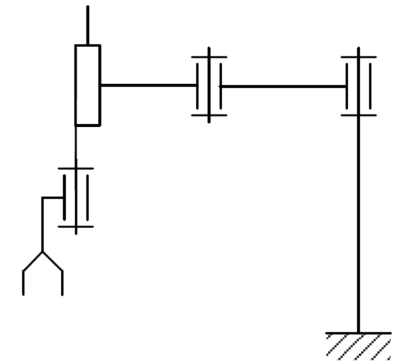
A:4
B:6
C:7
D:5
正确答案:【4】
6、判断题:自由度是指描述物体运动所需要的独立坐标数。
A:错
B:对
正确答案:【对】
7、判断题:工作空间又称工作范围、工作区域是指机器人末端执行器运动描述参考点所能达到的空间点的集合,一般用水平面和垂直面的投影表示。
A:对
B:错
正确答案:【对】
8、判断题:重复精度是指机器人每根轴能够实现的最小移动距离或最小转动角度。
A:对
B:错
正确答案:【错】
9、判断题:刚度是机器人机身或臂部在外力作用下抵抗变形的能力。
A:错
B:对
正确答案:【对】
10、判断题:新的工作原理制造的新型驱动器,如静电驱动器、压电驱动器、形状记忆合金驱动器、人工肌肉及光驱动器等。
A:错
B:对
正确答案:【对】
第三章 单元测试
1、单选题:图中  足的几何构型是( )。
足的几何构型是( )。
A:昆虫形
B:爬行动物
C:哺乳动物形
正确答案:【哺乳动物形】
2、单选题:图中  足的相对方位是( )。
足的相对方位是( )。
A:内侧相对弯曲
B:外侧相对弯曲
C:同侧弯曲
正确答案:【内侧相对弯曲】
3、单选题:图中的机器人腕部为( )。 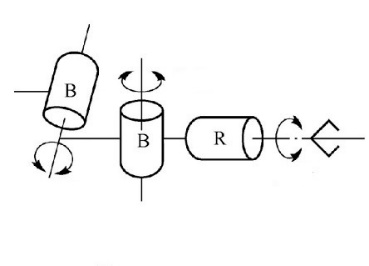
A:二自由度BR手腕
B:三自由度BBR手腕
C:三自由度RBB手腕
D:二自由度RB手腕
正确答案:【三自由度BBR手腕】
4、单选题:机器人为了进行作业,就必须配置操作机构,这个操作机构叫做( ),有时也称为末端操作器。
A:腕部
B:手部
C:臂部
D:机身
正确答案:【手部】
5、单选题:“玉兔”月球车车轮是镂空金属带轮,镂空是为了( )。
A:减少颠簸
B:承重
C:美观
D:避免打滑、减少扬尘
正确答案:【避免打滑、减少扬尘】
6、判断题:垂直移动是指手臂的伸缩运动。
A:错
B:对
正确答案:【错】
7、判断题:气吸式手部是利用吸盘内的压力与大气压之间的压力差而工作的。
A:错
B:对
正确答案:【对】
8、判断题:充气球轮用来爬越阶梯,及在水田中行驶。
A:错
B:对
正确答案:【错】
9、判断题:不能由两个R关节组成RR关节, 因为两个R共轴线, 所以退化了一个自由度, 实际只构成了单自由度腕部。
A:对
B:错
正确答案:【对】
10、判断题:智能化手爪具备一种或多种传感器。
A:对
B:错
正确答案:【对】
第四章 单元测试
1、单选题:工业机器人的驱动系统是驱使什么运动的装置。
A:执行机构
B:传感器
C:控制器
正确答案:【执行机构】
2、单选题:以下不属于机器人驱动系统分类为( )。
A:手动驱动
B:气压驱动
C:电动驱动
D:液压驱动
正确答案:【手动驱动】
如有任何疑问请及时联系QQ 50895809

